Interactive Motion Generation Using Inverse Kinematics
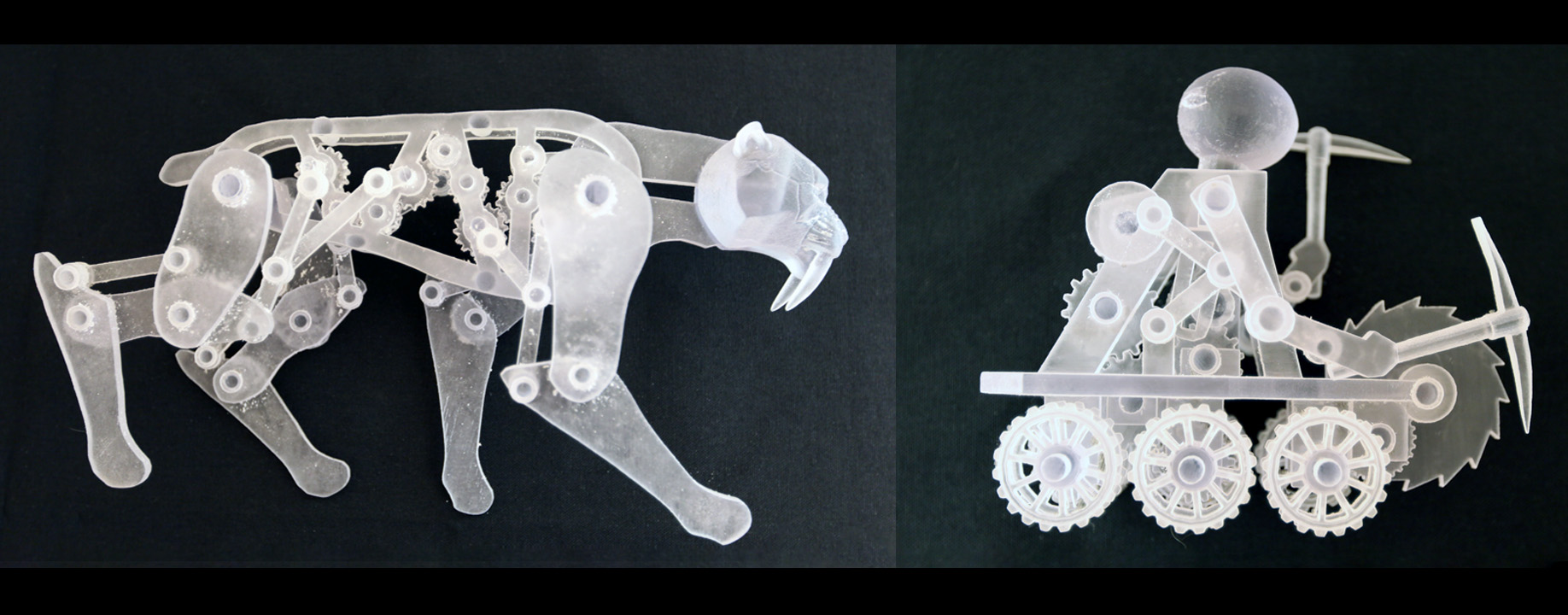
We present an interactive design system that allows non-expert users to create animated mechanical characters. Given an articulated character as input, the user iteratively creates an animation by sketching motion curves indicating how different parts of the character should move. For each motion curve, our framework creates an optimized mechanism that reproduces it as closely as possible. The resulting mechanisms are attached to the character and then connected to each other using gear trains, which are created in a semi-automated fashion. The mechanical assemblies generated with our system can be driven with a single input driver, such as a hand-operated crank or an electric motor, and they can be fabricated using rapid prototyping devices. We demonstrate the versatility of our approach by designing a wide range of mechanical characters, several of which we manufactured using 3D printing. While our pipeline is designed for characters driven by planar mechanisms, significant parts of it extend directly to non-planar mechanisms, allowing us to create characters with compelling 3D motions.
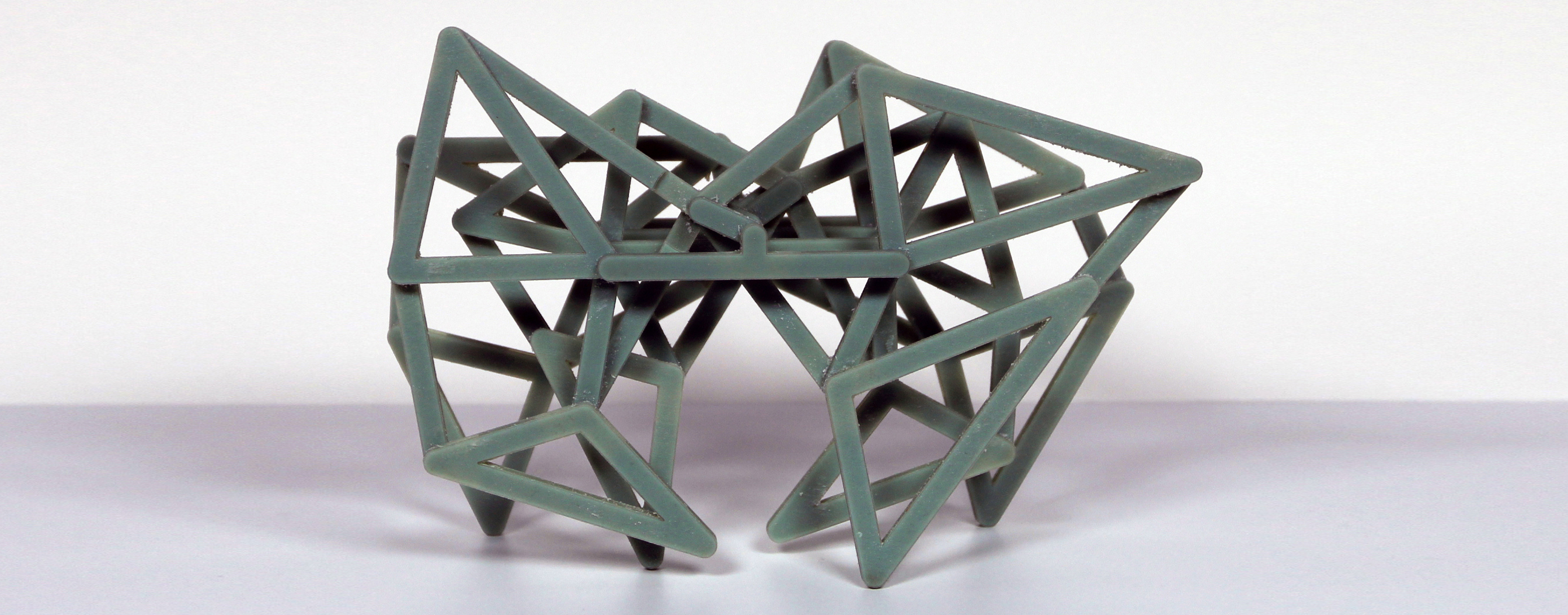
Topology Design for Multibar Linkages

We present a design system for linkage-based characters, combining form and function in an aesthetically-pleasing manner. Linkage-based character design exhibits a mix of discrete and continuous problems, making for a highly unintuitive design space that is difficult to navigate without assistance. Our system significantly simplifies this task by allowing users to interactively browse different topology options, thus guiding the discrete set of choices that need to be made. A subsequent continuous optimization step improves motion quality and, crucially, safeguards against singularities. We demonstrate the flexibility of our method on a diverse set of character designs, and then realize our designs by physically fabricating prototypes.
Inverse Symbolic Kinematics
We present a method for interactive editing of planar linkages. Given a working linkage as input, the user can make targeted edits to the shape or motion of selected parts while preserving other, e.g., functionally-important aspects. In order to make this process intuitive and efficient, we provide a number of editing tools at different levels of abstraction. For instance, the user can directly change the structure of a linkage by displacing joints, edit the motion of selected points on the linkage, or impose limits on the size of its enclosure. Our method safeguards against degenerate configurations during these edits, thus ensuring the correct functioning of the mechanism at all times. Linkage editing poses strict requirements on performance that standard approaches fail to provide. In order to enable interactive and robust editing, we build on a symbolic kinematics approach that uses closed-form expressions instead of numerical methods to compute the motion of a linkage and its derivatives. We demonstrate our system on a diverse set of examples, illustrating the potential to adapt and personalize the structure and motion of existing linkages. To validate the feasibility of our edited designs, we fabricated two physical prototypes.
Compliant Mechanisms
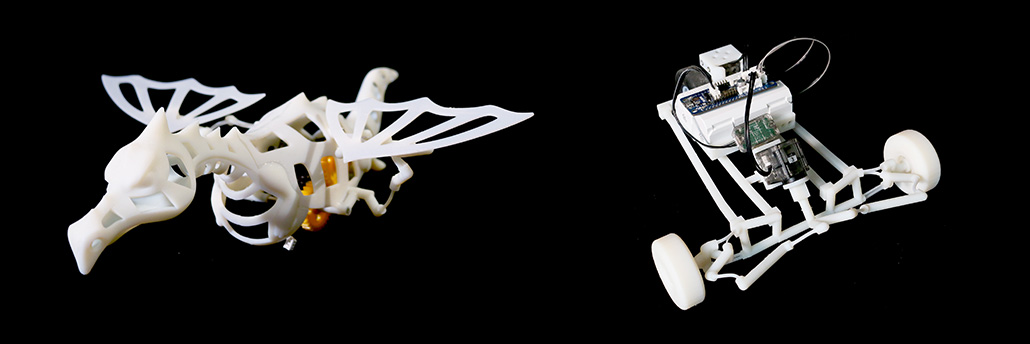
We present a computational tool for designing compliant mechanisms. Our method takes as input a conventional, rigidly-articulated mechanism defining the topology of the compliant design. This input can be both planar or spatial, and we support a number of common joint types which, whenever possible, are automatically replaced with parameterized flexures. As the technical core of our approach, we describe a number of objectives that shape the design space in a meaningful way, including trajectory matching, collision avoidance, lateral stability, resilience to failure, and minimizing motor torque. Optimal designs in this space are obtained as solutions to an equilibrium-constrained minimization problem that we solve using a variant of sensitivity analysis. We demonstrate our method on a set of examples that range from simple four-bar linkages to full-fledged animatronics, and verify the feasibility of our designs by manufacturing physical prototypes.