Deeply supervised Style Transfer
Course project for HS20 Deep Learning in collaboration with fellow students Alain Ryser, Adrian Schneebeli and Tim Fischer
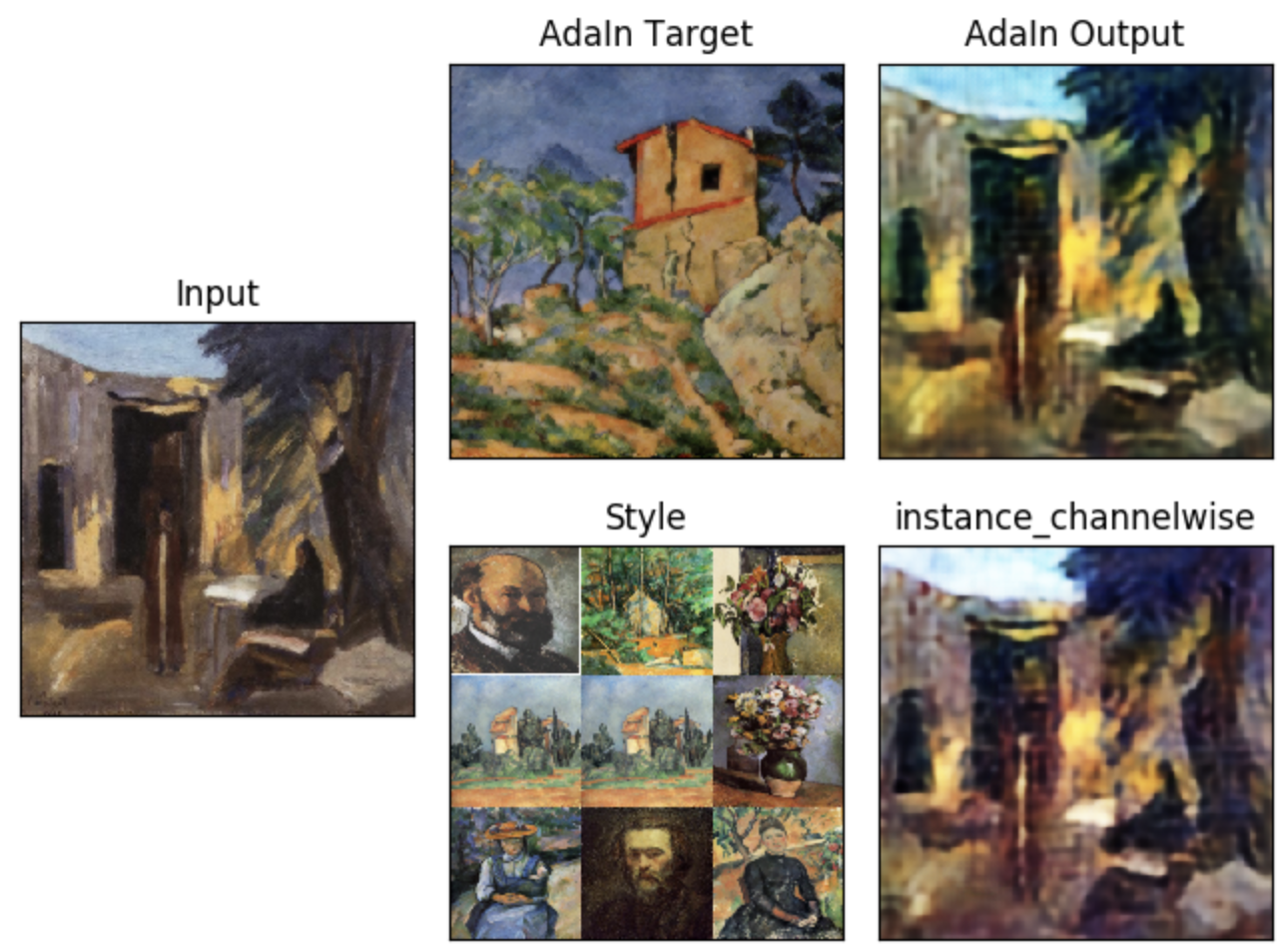
Style transfer is a technique by which the content of an image is preserved while its style is modified. Existing methods either transfer the style from an input image and apply it to a content image, or learn a specific style which they are then able to apply to an arbitrary image. While the first type provides great amount of flexibility, it lacks a wider understanding of what a certain style amounts to. Conversely, the second type is severely limited in flexibility, since the network has to be retrained for each style. We propose an Auto Encoder (AE) architecture with deep supervision to learn the styles of artists and transfer images from one style to another. The style transfer is performed using normalisation and swapping of the encoded latent space statistics between source image and target artist embedding. Our method not only allows us the transfer of the style of a single image but rather of the complete works of a certain artist. Report: Deeply Supervised Style Transfer Report